
ジュナリです。
今回ははんだ付けすらしたことがない電子工作初心者の自分が多くの人に助けられながらRaspberry pi picoを使いPoke-Controller(MODIFIED版/Extention版)でゲームキューブを自動化した話です。初心者の方が同じ轍を踏まない様にカキシルス。
(みずようかん様が書かれていた「GC自動化ver3アップデート」をPoke-Controlleでも動かせるようにしたというだけの記事です。)
目次
注意事項
※Poke-Controller(MODIFIED版/Extention版)の導入は各自で済ませておいてください本記事では解説しません。
※デジタルAV出力ポートがあるGCを買いましょう。たまに無いものがあるそうです。
Arduinoを持っている方
Raspberry pi picoでPoke-Controllerを動かすメリットは、機材を安くそろえられるというだけなので、すでにDOL Macro ControllerをArduinoで動かしている方は、以下の記事にPoke-Controllerで動かす解説が書かれています。
nemophila-tuyukusa.hatenablog.com
必要な機材等(下線にリンク付き)
1.映像出力関連
・キャプチャボード
(筆者購入時:2,250円)
switchの自動化をすでにしている方は購入不要。(正直うつれば何でもいい)
・GCをHDMIに変換するためのコンバーター
これが一番高い。著者はAliExpressでGCplugを5175円で購入。(たぶん偽物っぽいけど動くからヨシ!おそらく本物はこれ)
HDMI to HDMIminiのケーブル付きを選んで買いましょう。(選び忘れてケーブルが届かなかった場合はamazonで適当に買いましょう。)
2.操作関連(マイコン等)
・ゲームキューブ用 RJ-45ケーブル for Retro Board
(筆者購入時:980円)
・LANコネクタDIP化キット ※はんだ付け必須
(筆者購入時:200円)
これだけはんだ付けが必要なためはんだごてセットも買いましょう。(2000円くらい)
・Raspberry Pi Pico H
(筆者購入時:940円)
はんだ付けに自信のある人はこれとこれを買えば130円くらい安く済みます。
・microUSBケーブル
(700円くらい)
Raspberry Pi PicoとPCをつなぐのに使いますamazonで適当に買うか、家に転がっているものを使いしょう。
・ブレッドボード BB-102
(筆者購入時:300円)
・ジャンパーワイヤ
(筆者購入時:300円)
・マイクロサーボ 9g SG-90
(筆者購入時:550円)
コロシアムのリセットに必要。
上記のジャンパーワイヤだと付けづらいのでこちらも購入推奨。(switch自動化の時に使ったジャンパ-ワイヤでも可)
コロシアムの自動化を考えてない方は不要。
合計 約13500円 (キャプボとはんだごてを除けば約9000円)
まあまあ高いですがコンバーターが高いので仕方なし……安くてそれなりのモノ誰か教えてください。
導入手順
1.映像出力側の配線
キャプチャボード、コンバーター、ケーブルを用意。

コンバーターをGCのデジタルAV出力ポートに差し、ケーブルをPCとコンバーターに差す。


2.操作側の配線
ブレッドボード、ジャンパーワイヤ、LANコネクタ、サーボ、Raspberry Pi Picoを用意。

はんだごてを使いLANコネクタを組み立てます。
ますたー様が動画で組み立て方を解説していたのでこれを見ながら作ればなんとかなります。(めちゃくちゃわかりやすい)
ますたー様の記事より引用
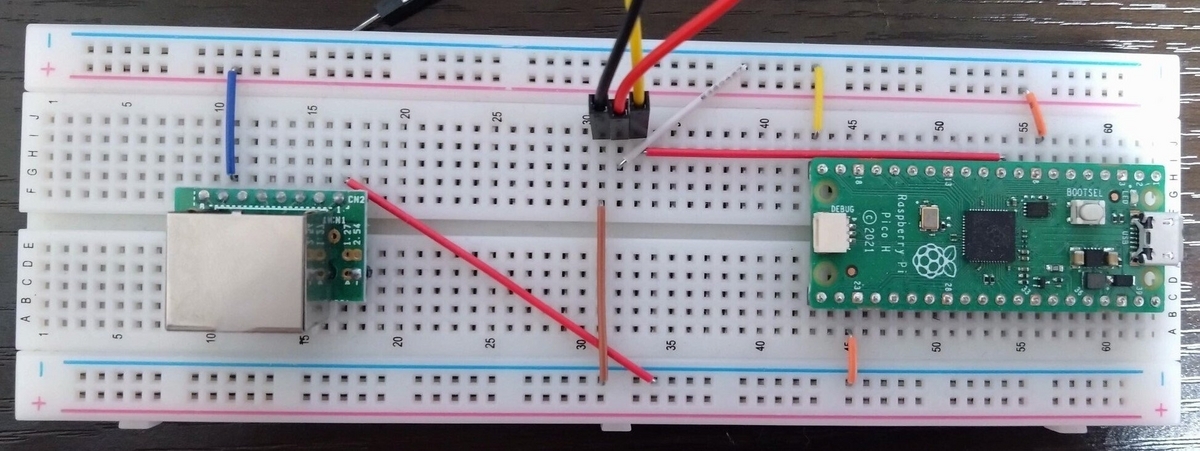
次にブレッドボードにジャンパーワイヤ、組み立てたLANコネクタ、サーボ、Raspberry Pi Picoを差し込みます。(電子工作よくわからない人も以下の画像と全く同じに作ればOKです。)
※2024/1/19追記 サーボにつながる赤の配線に誤りがあり、みずようかん様の記事が修正されたため実際の配線画像を修正版に差し替えました。
GC自動化の記事久しぶりに見たらサーボの5Vが3.3Vに繋がってたので注意書きを追記したhttps://t.co/m9cTRSwQ0s pic.twitter.com/unhaaTWwu6
— みずようかん (@AT12806379) 2024年1月19日

・サーボをつながない場合




組み立てたブレットボードにRJ-45ケーブルとmicroUSBケーブルを差し、GCとPCに差し込みます。

3.ファームウェアの導入
以下の記事を読みArduino IDEにRaspberry pi picoボードを追加する。
https://tomosoft.jp/design/?p=43370
https://github.com/futo030/HITSUMABUSHI_GC_controller_for_Poke-Controller
ライブラリマネージャーから「Bluewhale」をインストールし
スケッチ例→Bluewhale→WHALEを開く。
このWHALEをRaspberry Pi Picoに書き込めばDOL Macro Controllerを動かすことができますが、Poke-Controllerを動かすことはできません。なのでフウ様の作ったファームウェア「HITSUMABUSHI」と組み合わせます。
※2024/3/17追記。
HITSUMABUSHIが非公開となったためメイユールさんの作成したファームウェア「Jiangtun」の導入方法を紹介します。
①以下のサイトからjiangtun-v2.0.0-alpha-pico.uf2をダウンロードする。
②Raspberry pi picoのBOOTSEL(小さい白いボタン)を押しながらPCに接続。
③出てきたフォルダにjiangtun-v2.0.0-alpha-pico.uf2をドラッグ&ドロップ。
④Poke-Controllerを起動し画面が映りボタンが反応すれば導入終了です!
(デフォルトだとBaudRateが9600なので4800を選んでください。)

MODIFIED版v3.0.2.8以降を使っている人へ
v3.0.2.8からBaudRateが9600に固定されてしまいます。
4800にするには少し手順がいるため記載しておきます。
①SerialControllerフォルダにあるWindow.pyを開く。
②48行目をself.baud_rate_state = "readonly"に変更して保存。
~終~
おわりに
導入についてアドバイスをしてくれたメイユール様、みずようかん様、フウ様、yayoi様本当にありがとうございました!
また、何か不明点がありましたらジュナリ(@junari000)にDMかリプライを送っていただければ反応します。(回答できるとはいってない)